Projects
I treat microrobotic flight as a multidisciplinary problem, covering wing kinematics, fluid dynamics, and control alongside the robot structure. Accordingly, I’ve built a set of small projects that each target one link in that chain. These efforts help turn biological inspiration into robotic embodiment. I’m steadily building the toolkit needed to develop a coherent flying system eventually.
Wingbeat model and visualization
As an early preparation, I built a wing-kinematics model of RoboBee by reconstructing its typical wingbeat (stroke, pitch, and optionally deviation) and turning it into a clean visualization. The model is built in Mathematica and fully parametrized. Default parameters are from
this paper. This serves as a reusable tool for different flapping patterns.
Simplified kinematics, perspective view
side view (unit: cm)
2D FEM fluid solver
Finite methods have been widely used for fluid-structure-interaction simulation, serving as a high-fidelity tool for studying the vortex structure in flapping flight. I took an advanced course:
FEM for FSI and implemented a 2D fluid solver based on FEM (CG) with SUPG stabilization. The solver is validated with a classic lid-driven cavity flow benchmark.
Report
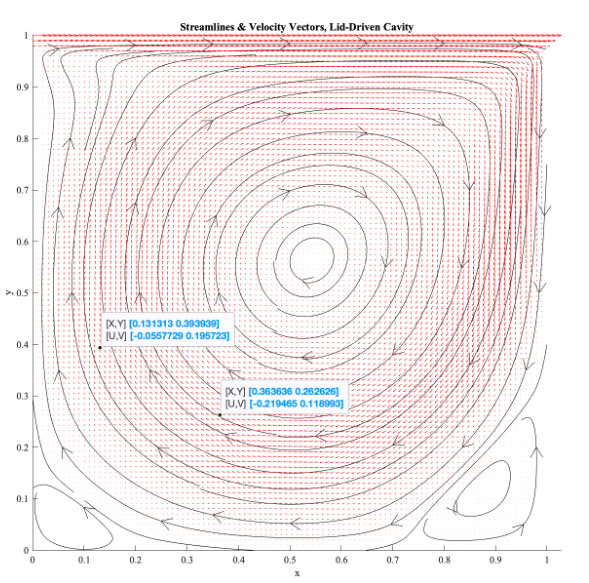
The streamline plot of fully-developed
flow field by our solver
flow field by our solver
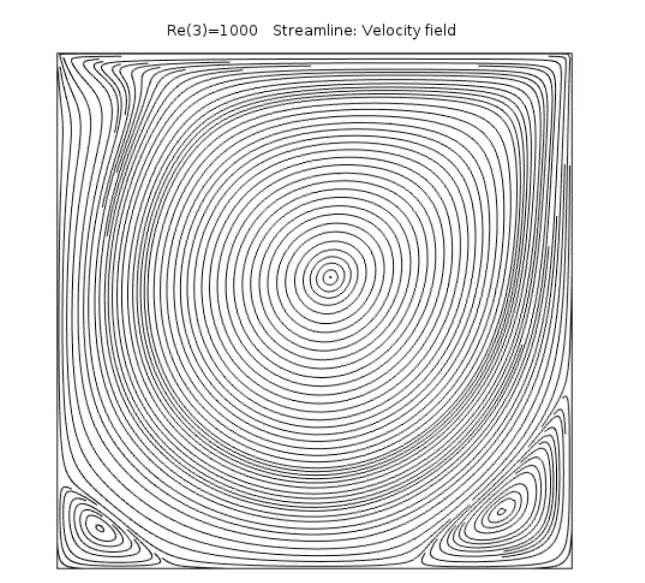
The benchmark streamline plot
by commercial software.
by commercial software.
PLAY MAGNETS!
Play Magnets! is a collection of small magnetic “sketches” I've developed, refined, or stumbled upon. Magnetism is rich in interesting, sometimes counter-intuitive behavior, and its contactless nature makes it a powerful tool for precise control at insect scale. Feel free to formalize the theoretical models and make them generalizable!
1) One-DoF magnetic setup for fruitfly steering study
To facilitate the steering study, I optimized and engineered a magnetic setup to "tether" the fly onto a pin. It permits only 1 DoF yaw-steering, decoupling the yaw-motion from the fly's complex flight maneuvers, making it possible to investigate the turning mechanism.
Report
Light-induced steering (side view)
Finger motion-induced steering (top view)
2) Magnetic levitation rail for lab experiments
(Small Invention, Spring 2025) Possibly the first non-electromagnetic, room-temperature magnetic levitation track that is deployable in principle. Compared to existing
diamagnetic-based systems, it suppresses vertical oscillation, and can be extended to arbitrary length, both make it practical.
The prototype of the magnetic levitation rail (original speed).
The modular design allows it to be extended to arbitrary length.
The modular design allows it to be extended to arbitrary length.
Currently it is used for our flapping-wing water test, where the robot suffers from the lateral drifting when moving forward. The rail can constrain the drift ≤ 0.5 mm.